Example: 1D Oscillator - Part 4/5¶
Author: Dr. Daning Huang
Date: 01/03/2026
Updated: 05/07/2026
In this part, we explore the use of sequential dynamics models (SDMs) for data with time delay.
Meanwhile, since the model starts to be more complex, we will also show how to visualize the model structure to understand/debug the model.
Formulation¶
Consider \(T\) steps of observations \(x_{1:T}\) and inputs \(u_{1:T}\), SDMs map these to a \(T\)-step sequence of latent states \(z_{1:T}\), and predict \(z_{T+1}\). Formally, we can write
Encoder: \(z_{1:T}=f_E(x_{1:T}, u_{1:T})\)
Dynamics: \(z_{T+1}=f_P(z_{1:T})\), then assemble \(z_{2:T+1}=[z_{2:T}, z_{T+1}]\)
Decoder: \(x_{2:T+1}=f_D(z_{2:T+1})\)
In practice, either \(f_E\) or \(f_P\) can be sequential modules, e.g., RNNs. For technical details, one can refer to the theory documentation.
In this example, we demonstrate two SDM architectures,
Stepwise MLP’s as encoder and decoder, RNN as processor
RNN as encoder, brutal force MLP as processor, stepwise MLP as decoder
Preparation¶
Same drill like before.
import copy
import warnings
warnings.filterwarnings('ignore')
import numpy as np
import torch
from dymad.io import load_model, visualize_model # New function
from dymad.models import DSDM # New model
from dymad.training import NODETrainer # For discrete-time model
from dymad.utils import plot_trajectory, TrajectorySampler
B = 128 # Number of trajectories
N = 501 # Number of steps
t_grid = np.linspace(0, 5, N)
A = np.array([
[0., 1.],
[-1., -0.1]])
def f(t, z, u): # Define the dynamics
return (z @ A.T) + u
g = lambda t, z, u: z # Define the observation
# Chirp input for training
config_chr = {
"control" : {
"kind": "chirp",
"params": {
"t1": 4.0,
"freq_range": (0.5, 2.0),
"amp_range": (0.5, 1.0),
"phase_range": (0.0, 360.0)}}}
# Random Gaussian input for testing/generalization
config_gau = {
"control" : {
"kind": "gaussian",
"params": {
"mean": 0.5,
"std": 1.0,
"t1": 4.0,
"dt": 0.2,
"mode": "zoh"}}}
# Generate data
sampler_chr = TrajectorySampler(f, g, config='lti_data.yaml', config_mod=config_chr)
ts, zs, us, xs = sampler_chr.sample(t_grid, batch=B, save='./data/lti.npz')
sampler_gau = TrajectorySampler(f, g, config='lti_data.yaml', config_mod=config_gau)
Set up the options for the trainer, where
We only consider time delay in data transformation for simplicity.
The
latent_dimensionis the dimension of \(z_{1:T}\); in the current case \(T=2\) so each \(z\) is 4-dimensional.Note the new options
autoencoder_typeandprocessor_typethat specifies the SDM.The optimizer settings now sit in a single
phasesentry.We use trajectory chopping and sweeping to enhance the training.
opt_case1 = {
"transform_x": {"type": "delay", "delay": 1},
"transform_u": {"type": "delay", "delay": 1},
"model": {
"name" : 'ltd_sdm_smp',
"autoencoder_type" : 'seq_smp', # Stepwise MLP as encoder/decoder
"encoder_layers" : 1,
"decoder_layers" : 1,
"processor_layers" : 1, # RNN as processor by default
"hidden_dimension" : 16,
"latent_dimension" : 8,
"activation" : "none", # Linear model as the underlying data is linear
"weight_init" : "xavier_uniform",
"gain" : 0.01 # Smaller initialization for more stable training
},
"criterion": {
"dynamics" : {"weight" : 1.0},
"recon" : {"weight" : 1.0}
},
"phases" : [{
"type": "optimizer",
"name": "NODE",
"trainer": "NODE",
"n_epochs": 500,
"save_interval": 10,
"load_checkpoint": False,
"learning_rate": 5e-3,
"decay_rate": 0.999,
"chop_mode": "unfold",
"chop_step": 0.5,
"sweep_lengths": [3, 5, 7],
"sweep_epoch_step": 200
}]
}
opt_case2 = copy.deepcopy(opt_case1)
opt_case2["model"]["name"] = 'ltd_sdm_std'
opt_case2["model"]["autoencoder_type"] = 'seq_std' # RNN as encoder, MLP as decoder
opt_case2["model"]["processor_type"] = 'mlp_smp' # Brutal force MLP as processor
opts = [opt_case1, opt_case2]
IDX = [0, 1]
labels = [opts[_i]["model"]['name'] for _i in IDX]
Training¶
config_path = 'lti_model.yaml'
for _i in IDX:
trainer = NODETrainer(config_path, DSDM, config_mod=opts[_i])
trainer.train();
Results¶
Prediction¶
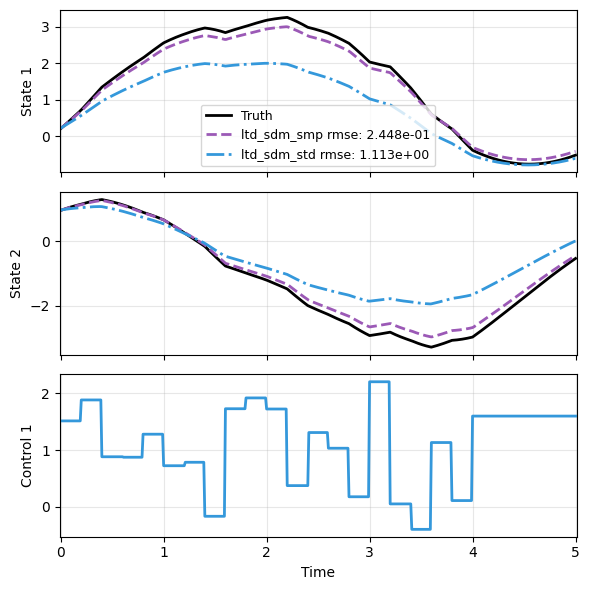
We first check the model prediction. Again due to time delay, t_data is reduced by 1 step during prediction. Both models appear to work OK.
sampler = TrajectorySampler(f, g, config='lti_data.yaml', config_mod=config_gau)
ts, xs, us, ys = sampler.sample(t_grid, batch=1)
x_data, t_data, u_data = xs[0], ts[0], us[0]
res = [x_data]
for _i in IDX:
_, prd_func = load_model(DSDM, f'{labels[_i]}.pt')
with torch.no_grad():
_pred = prd_func(x_data, t_data[:-1], u=u_data)
res.append(_pred)
plot_trajectory(
np.array(res), t_data, "LTD",
us=u_data, labels=['Truth']+labels, ifclose=False);
Model visualization¶
DyMAD provides visualize_model to show the architecture of a model, including the input/output dimensions of each layer. The tool is based on the torchview package.
Unfortunately, at the point of writing, the tool has two limitations:
It cannot differentiate among inputs and among outputs, so they are uniformly labelled as
input-tensors andoutput-tensors, respectively. One needs to infer the specific input/output based on the graph.The inputs go through some bookkeeping blocks such as
__getitem__, which is only for generating dimensionally consistent data. One should ignore these blocks.
graphs = []
for _i in IDX:
model_graph = visualize_model(
mdl_class=DSDM, # Model class
checkpoint_path=f'{labels[_i]}.pt', # Checkpoint of the model
ref_data='./data/lti.npz', # Reference dataset to determine input dimensions
depth=1, # Level of details, the higher the more
ifsave=False)
graphs.append(model_graph)
Below is the first case. The left is the initial condition \(x_0\), given the dimension (raw \(x\) is 2D, time delay \(T=2\), so \(4=2\times 2\)); the right is the input \(u\) (raw \(u\) is 1D and \(2=1\times 2\)).
Next, we see that \(x_0\) and \(u\) are passed into StepwiseModel, the encoder, as we have specified. The single output on the right produced by StepwiseModel is the latent states \(z\). The output also passes to another StepwiseModel, the decoder, again as we have specified; the output is the decoded \(x\).
The remaining branch is then apparently for SimpleRNN as processor. It takes input dimension of 8, for \(z_{1:2}\), and returns dimension 4 for \(z_3\). The __getitem__ obtains \(z_2\) and later cat concatenates the two pieces into \(z_{2:3}\), of dimension 8.
graphs[0] # ltd_sdm_smp

Next, the second case. Using the same reasoning as before, the inputs from left to right are \(x\) and \(u\), respectively. This time SimpleRNN is used as encoder, and its output is passed to a brutal force MLP for processing and a StepwiseModel to decode.
graphs[1] # ltd_sdm_std

The models in this example do not consider time, so the time data path is not shown. However, we can set show_all_paths=True to visualize all data paths.
In the figure, we see an additional input-tensor, which corresponds to the time \(t\); it does not contribute to the output, so the path stops before passing to the NN models.
model_graph = visualize_model(
mdl_class=DSDM, checkpoint_path=f'{labels[0]}.pt',
ref_data='./data/lti.npz', depth=1, ifsave=False,
show_all_paths=True);
model_graph
