Example: Kernel-based Dynamics - Introduction¶
Author: Dr. Daning Huang
Date: 09/27/2025
Updated: 05/07/2026
Introduction¶
The kernel model, esp. kernel ridge regression (KRR), is a popular type of linear models for regression with nonlinear features.
Scalar case¶
Given a dataset of \(N\) samples, inputs \(X=[x_1,x_2,\cdots,x_N]\) and outputs \(Y=[y_1,y_2,\cdots,y_N]\), the KRR model is
Vector case¶
For the case of multiple outputs, one could fit
MultiOuputShared: one KRR for each output, and each KRR share the same kernel functionMultiOuputIndep: one KRR for each output, and each KRR has a different kernel functionOperatorValued: Using a matrix kernel function, one fit one large KRR for all output
For the last case, one simple example is the separable kernel,
Another special case is the diagonal kernel
MultiOuputIndep.
Applying to dynamics¶
The KRR can provide a parametrized model \(f(z;\Theta)=K(z,Z)\Theta\), and it can be used to represent the dynamics. Some typical forms are
ContinuousTime: \(\dot{z}=f(z;\Theta)\)DiscreteTime: \(z_{n+1}=f(z_n;\Theta)\)SkipConnection: \(z_{n+1}=z_n + f(z_n;\Theta)\)
Furthermore, one can wrap around the dynamics with an autoencoder that maps observations \(x\) and inputs \(u\) to latent states \(z\).
To learn the dynamics, one can either
Estimate \(\dot{z}\) or use \(z_{n+1}\) to assemble the targets for KRR, and use the closed form solution to find \(\Theta\), or
Pair the linear solution with our
NODETrainerorWeakFormTrainerfor further tuning (esp. when an autoencoder is used).
In this example…¶
The philosophy of DyMAD is to modularize every piece, so that it can support as many combinations as possible.
For the case of kernels, it supports all possible combinations of the above, e.g., a MultiOuputShared kernel with DiscreteTime dynamics. But with the same dynamics one can swap out to use a OperatorValued kernel, or with the same kernel swap out to use SkipConnection dynamics. Lastly, any of these dynamics can be trained using our LinearTrainer, or further fine-tuned by other trainers.
We will demonstrate the above capabilities using a 2D dynamics that resides on a circle-like manifold.
Setting up the Problem¶
The example is based on our work in ICLR 2025.
Consider an angular dynamics for \(\theta\) periodic on \([0, 2\pi]\)
The main challenge to learn such dynamics is to keep the states on the manifold over a long time horizon.
import warnings
warnings.filterwarnings('ignore')
import copy
import matplotlib.pyplot as plt
import numpy as np
import torch
from dymad.io import load_model
from dymad.models import DKMSK, KM, KMM # Some kernel models - explained later
from dymad.training import LinearTrainer # Linear trainer for this example
from dymad.utils import plot_trajectory, TrajectorySampler
B = 1
N = 201
t_grid = np.linspace(0, 8, N)
s5 = np.sqrt(5)
K, D = 3, 0.3
# \dot{\theta} = 3/2 - \cos(\theta)
def dyn(tt, K=K, D=D):
vv = 2 * np.arctan(np.tan(s5*tt/4)/s5)
rr = 1 + D*np.cos(K*vv)
uu = np.array([
rr*np.cos(vv),
rr*np.sin(vv)]).T
return vv, uu
t_ref = np.linspace(0, 6, 51)
_ref = dyn(t_ref)[1]
def f(t, x):
_x = np.atleast_2d(x)
_t = np.arctan2(_x[:,1], _x[:,0])
_v = 1.5 - np.cos(_t)
_r = 1 + D*np.cos(K*_t)
_d = -K*D*np.sin(K*_t)
_c, _s = np.cos(_t)*_v, np.sin(_t)*_v
_T = np.vstack([
-_r*_s+_d*_c, _r*_c+_d*_s]).T
return _T.squeeze()
"""ker_data.yaml
dims:
states: 2
inputs: 0
observations: 2
solver:
method: RK45
rtol: 1.0e-6
atol: 1.0e-6
"""
smpl = {'x0': {
'kind': 'perturb',
'params': {'bounds': [0, 0], 'ref': _ref}}
} # Ensure the initial conditions are on manifold
sampler = TrajectorySampler(f, config='ker_data.yaml', config_mod=smpl)
ts, xs, ys = sampler.sample(t_grid, batch=B, save='./data/ker.npz')
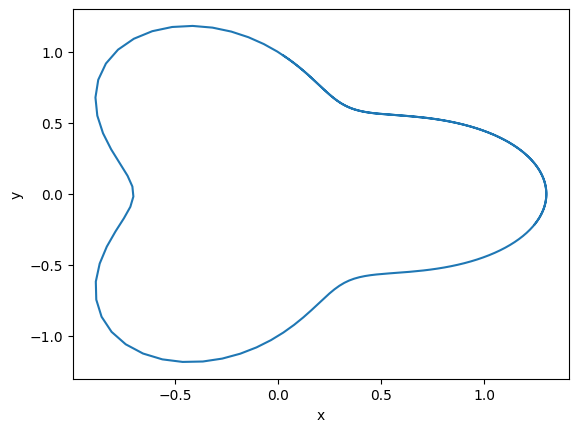
Trajectory in phase space.
fig = plt.figure()
plt.plot(ys[0, :, 0], ys[0, :, 1])
plt.xlabel('x')
plt.ylabel('y');
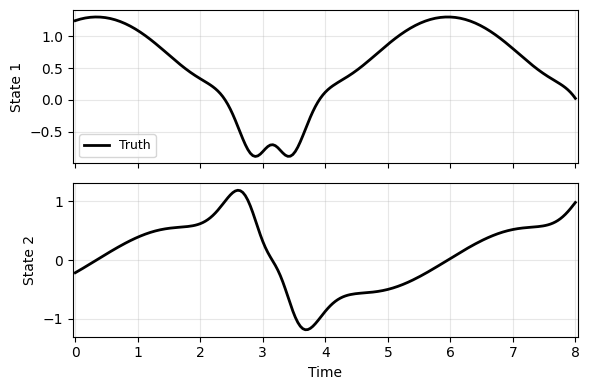
Trajectory in time domain - quite oscillatory and non-trivial to learn.
plot_trajectory(np.array([ys[0]]), ts[0], "S1", labels=['Truth'], ifclose=False);
Setting up the Model¶
We will consider four models in this case.
km_exp:ContinuousTimemodel withMultiOuputSharedkernel, using an Exponential kernel \(k(x,x';l)=\exp(-\|x-x'\|/l)\).dks_exp:SkipConnectionmodel withMultiOuputSharedkernel, using also an Exponential kernel.dks_dm: Same as #2 but using a Diffusion Map kernel.kmm_tn:ContinuousTimemodel withOperatorValuedkernel, using a Tangent kernel from ICLR 2025.
ContinuousTime, Exponential¶
# Dictionary for kernel
opt_exp = {
"type": "sc_exp", # Scalar, Exponential
"input_dim": 2, # Input dimension, the 2 states in our case
"lengthscale_init": 1.0 # Prescribed length scale
}
# Dictionary for model
RIDGE = 1e-6 # The ridge parameter
mdl_exp = {
"name" : 'ker_model',
"encoder_layers" : 0,
"decoder_layers" : 0,
"kernel_dimension" : 2, # This is to match input_dim
"type": "share", # MultiOuputShared
"kernel": opt_exp, # Supply kernel here
"dtype": torch.float64,
"ridge_init": RIDGE
}
SkipConnection, Exponential¶
This does not need additional definitions. We just need to supply the previous dictionaries to a SkipConnection model.
SkipConnection, Diffusion Map¶
opt_dm = {
"type": "sc_dm", # Scalar, Diffusion Map
"input_dim": 2,
"eps_init": None, # If the length scale is not provided, a heuristic approach will be used
}
mdl_dm = copy.deepcopy(mdl_exp)
mdl_dm["kernel"] = opt_dm # Only need to swap out the kernel
ContinuousTime, OperatorValued¶
# Scalar kernel base - Gaussian
opt_rbf = {
"type": "sc_rbf",
"input_dim": 2,
"lengthscale_init": 1.0
}
# Tangent kernel
opt_opk = {
"type": "op_tan",
"input_dim": 2,
"output_dim": 2,
"kopts": opt_rbf # Builds upon a Gaussian kernel
}
# The model
mdl_mn = {
"name" : 'ker_model',
"encoder_layers" : 0,
"decoder_layers" : 0,
"kernel_dimension" : 2,
"manifold" : { # Options for manifold calculations
"d" : 1, # Intrinsic dimension
"g" : 6, # Order of Generalized Moving Least Squares
"T" : 5 # Order of tangent basis estimation
},
"type": "tangent", # Specialized kernel model with tangent space
"kernel": opt_opk,
"dtype": torch.float64,
"ridge_init": RIDGE
}
Train the Model¶
Training options¶
# Options for linear solution
trn_ln = {
"n_epochs": 1,
"save_interval": 100,
"load_checkpoint": False,
"method": "raw"
}
# Options for the tangent model
# Using first-order finite difference for time derivative
trn_l1 = copy.deepcopy(trn_ln)
trn_l1["kwargs"] = {"order": 1}
config_path = 'ker_model.yaml'
# Collection of training configurations
cfgs = [
('km_exp', KM, {"model": mdl_exp, "training" : trn_ln}),
('dks_exp', DKMSK, {"model": mdl_exp, "training" : trn_ln}),
('dks_dm', DKMSK, {"model": mdl_dm, "training" : trn_ln}),
('kmm_tn', KMM, {"model": mdl_mn, "training" : trn_l1}),
]
IDX = range(len(cfgs))
labels = [cfgs[i][0] for i in IDX]
"""ker_model.yaml
data:
path: './data/ker.npz'
n_samples: 1
n_steps: 201
double_precision: true
transform_x:
type: "identity"
transform_u:
type: "identity"
split:
train_frac: 1.0 # Only one trajectory, so no train-valid-test split
dataloader:
batch_size: 1
"""
The training¶
for i in IDX:
mdl, MDL, opt = cfgs[i]
opt["model"]["name"] = f"ker_{mdl}"
trainer = LinearTrainer(config_path, MDL, config_mod=opt)
trainer.train()
Prediction¶
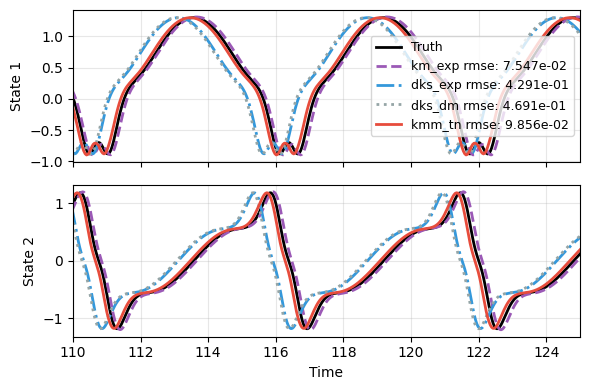
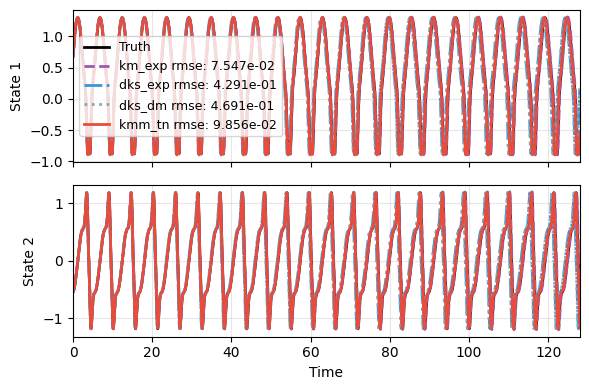
We will focus on the long-term prediction capability. The initial condition is randomly sampled from the manifold.
The first figure shows that all models tend to capture trend with the right wave form.
The second figure zooms, and shows that the scalar kernel models all show some lag in phase over time, but some are less, such as the tangent kernel.
scl = 16
t_pred = np.linspace(0, 8*scl, N*scl) # 16 times longer than training length
sampler = TrajectorySampler(f, config='ker_data.yaml', config_mod=smpl)
ts, xs, ys = sampler.sample(t_pred, batch=1)
x_data = xs[0]
t_data = ts[0]
res = [x_data]
for _i in IDX:
mdl, MDL, _ = cfgs[_i]
_, prd_func = load_model(MDL, f'ker_{mdl}.pt')
with torch.no_grad():
pred = prd_func(x_data, t_data)
res.append(pred)
plot_trajectory(
np.array(res), t_data, "S1",
labels=['Truth']+labels, ifclose=False);
plot_trajectory(
np.array(res), t_data, "S1",
labels=['Truth']+labels, ifclose=False)
plt.xlim([110, 125]);