Example: 1D Oscillator - Part 5/5¶
Author: Dr. Daning Huang
Date: 12/09/2025
Updated: 05/07/2026
In Part 5 of this example, we explore the validation procedure in DyMAD. This is particularly useful when one wants to determine the hyperparameters of the model, such as layer size and depth. DyMAD provides a handy functionality that
Sweeps over a given set of parameters
Trains models for each combination
Records the validation losses
Selects the final model with the lowest validation loss.
Preparation¶
To start with, let’s import the necessary modules, which should be familiar now given Part 1.
import warnings
warnings.filterwarnings('ignore')
import matplotlib.pyplot as plt
import numpy as np
import torch
from dymad.io import load_model
from dymad.models import KBF
from dymad.training import WeakFormTrainer
from dymad.utils import plot_multi_trajs, TrajectorySampler
We will recycle the training data from previous parts, so no data generation here.
Parametric Sweep¶
The full case file is given in lti_kbf_cv.yaml, but there is really only one new addition, a cv entry, as shown below.
The options specify a \(3\times 3\) parameter grid, where the koopman_dimension in the model entry spans over \(3, 4, 5\), and the weak-form window length in the first optimizer phase spans over \(13, 15, 17\).
The metric of total means using the total validation loss as the criterion to select the best model. One can also choose an individual loss, e.g., metric: "dynamics" for dynamics loss of validation, to choose the model.
"""
cv:
param_grid:
model.koopman_dimension: [3, 4, 5]
phases.0.weak_form_params.N: [13, 15, 17]
metric: "total"
"""
Training¶
The training is actually identical to the regular training. But during training, this time you would see folders such as _c0_f0, _c1_f0, etc., where ci indicates the ith parameter combination.
config_path = 'lti_kbf_cv.yaml'
trainer = WeakFormTrainer(config_path, KBF)
trainer.train();
Running multiple trials can be tedious, so we also offer a multi-processing option. It is recommended to do so in a standalone script, with the following lines. A full example is in scripts/linear_time_invariant/lti_mp.py.
"""
import torch.multiprocessing as mp
if __name__ == "__main__":
mp.set_start_method("spawn", force=True) # Extra line for multi-processing
# Case set up as usual
# The new option, xx is the number of devices/threads that your machine can support
trainer = WeakFormTrainer(config_path, KBF, max_workers=xx)
trainer.train();
"""
Visualizing Validation Results¶
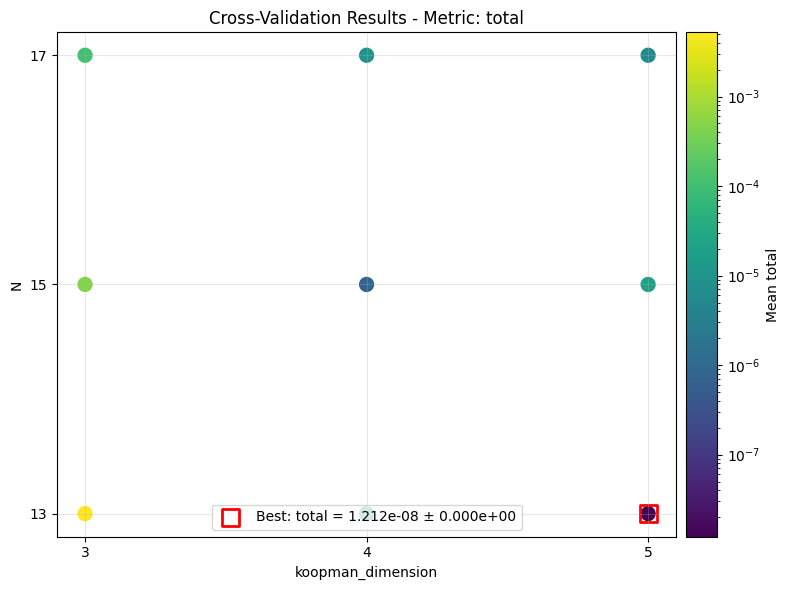
Once the results are available, we can review the distribution of validation losses and assess the optimality of the hyperparameters. There are several modes of plotting, as shown below.
The first is a 2D scatter plot over both parameters, and the red box shows the best combination.
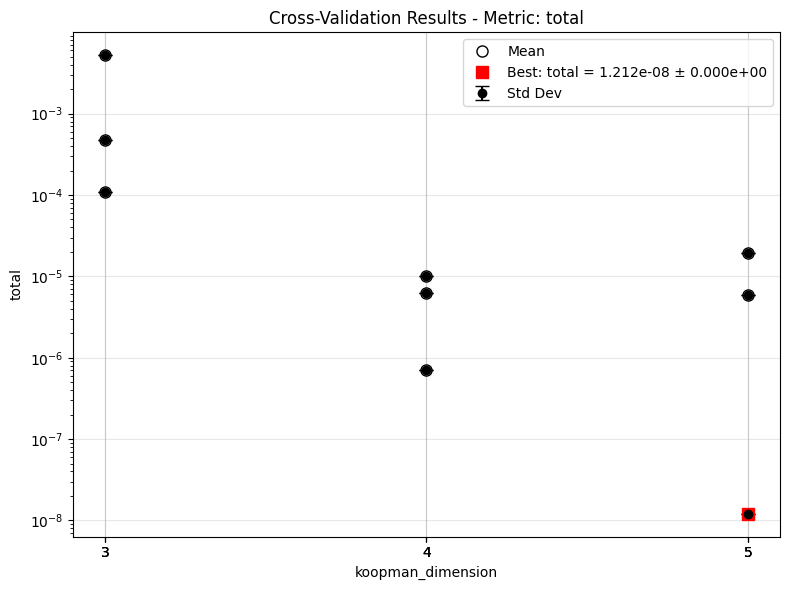
The second collapses all trials under one parameter, so for one value of parameter there are multiple points.
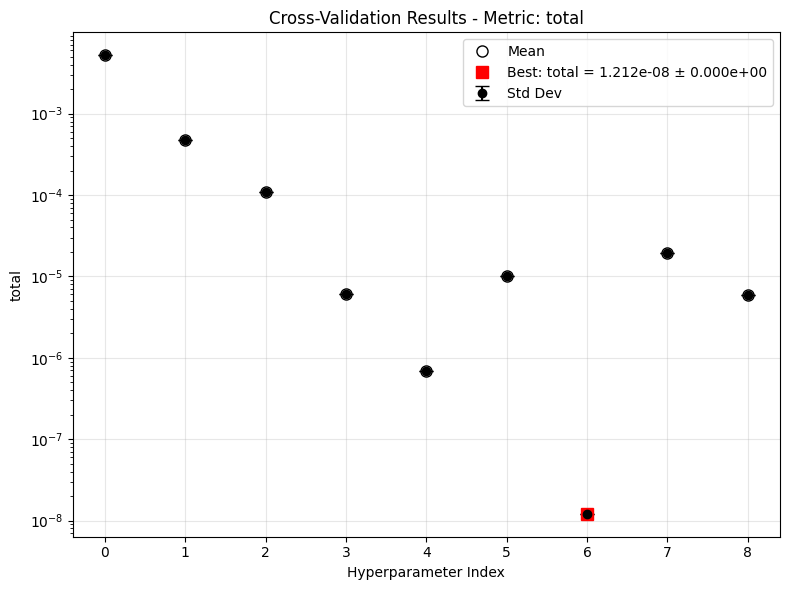
The third unrolls all trials into one axis.
The error bar in the latter two cases would be non-zero if we specified a \(k\)-fold training.
from dymad.utils import plot_cv_results # New function
keys = ['model.koopman_dimension', 'phases.0.weak_form_params.N']
plot_cv_results('lti_kbf_cv', keys, ifclose=False)
keys = ['model.koopman_dimension']
plot_cv_results('lti_kbf_cv', keys, ifclose=False)
plot_cv_results('lti_kbf_cv', None, ifclose=False)
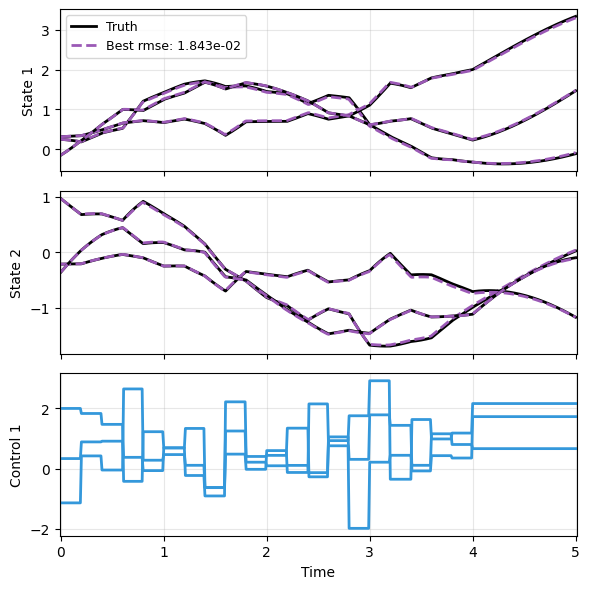
Checking the Prediction¶
This last step should be standard practice by now. The prediction appears fairly decent.
A = np.array([
[0., 1.],
[-1., -0.1]])
def f(t, x, u):
return (x @ A.T) + u
g = lambda t, x, u: x
config_gau = {
"control" : {
"kind": "gaussian",
"params": {
"mean": 0.5,
"std": 1.0,
"t1": 4.0,
"dt": 0.2,
"mode": "zoh"}}}
t_grid = np.linspace(0, 5, 501)
sampler = TrajectorySampler(f, g, config='lti_data.yaml', config_mod=config_gau)
ts, xs, us, ys = sampler.sample(t_grid, batch=3)
res = [xs]
_, prd_func = load_model(KBF, 'lti_kbf_cv.pt')
with torch.no_grad():
_pred = prd_func(xs, ts, u=us)
res.append(_pred)
plot_multi_trajs(
np.array(res), ts[0], "LTI",
us=us, labels=['Truth', 'Best'], ifclose=False);