Example: Kernel-based Dynamics - Lorenz-63¶
Author: Dr. Daning Huang
Date: 12/12/2025
Updated: 05/07/2026
Introduction¶
In the previous kernel example, we introduced the configuration of kernel models and the training procedure. Due to its linearity, kernel methods are one of the simplest model families for handling nonlinearity. A subtle but important step is choosing hyperparameters such as the kernel lengthscale and the ridge parameter. In our prior work, we show that careful hyperparameter selection is critical for accuracy, and with a good choice kernel models can compete with more sophisticated neural-network baselines.
In this example, we revisit the classical Lorenz-63 system using the current DyMAD training/config workflow. We will generate reproducible data, run kernel CV sweeps with the current LinearTrainer interface, and then extend the sweep with continue_training=True.
Problem Setup¶
The usual imports:
import warnings
warnings.filterwarnings('ignore')
from pathlib import Path
import copy
import matplotlib.pyplot as plt
import numpy as np
import torch
from dymad.io import load_model
from dymad.losses import vpt_loss
from dymad.models import DKMSK
from dymad.training import LinearTrainer
from dymad.utils import TrajectorySampler, plot_cv_results, plot_multi_trajs, plot_trajectory
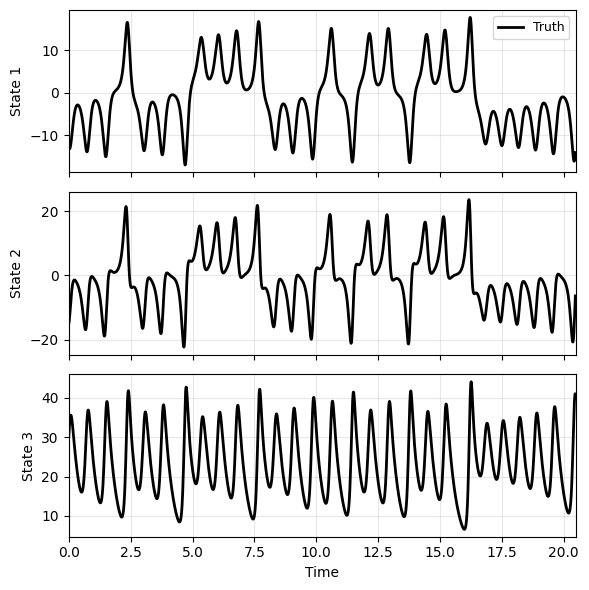
We generate the data in a specific way. To obtain a trajectory of length \(N\), we start from a random initial condition, integrate for \(N+4000\) steps with a step size of \(0.01\), and discard the first \(4000\) steps. This keeps the retained trajectory on the Lorenz attractor.
We generate one long trajectory for training and validation, then 50 fresh trajectories for testing. To keep reruns reproducible, we also fix the random seed and create the local data/ directory before writing artifacts.
SEED = 12345
np.random.seed(SEED)
torch.manual_seed(SEED)
DATA_DIR = Path('data')
DATA_DIR.mkdir(exist_ok=True)
M = 2048 # Training
V = 2000 # Validation
t_grid = np.linspace(0, 120, 12000) # Train+valid, with extra 4000 for burn-in
t_pred = np.linspace(0, 60, 6000) # Test, with extra 4000 for burn-in
sigma = 10.0
rho = 28.0
beta = 8.0 / 3.0
def f(t, x):
dxdt = np.zeros_like(x)
dxdt[0] = sigma * (x[1] - x[0])
dxdt[1] = x[0] * (rho - x[2]) - x[1]
dxdt[2] = x[0] * x[1] - beta * x[2]
return dxdt
"""lor_data.yaml
dims:
states: 3
inputs: 0
observations: 3
x0:
kind: uniform
params:
bounds:
- [-1.0, 1.0]
- [-1.0, 1.0]
- [-1.0, 1.0]
solver:
method: RK45
rtol: 1.0e-8
atol: 1.0e-8
postprocess:
n_skip: 4000 # Extra option to discard initial steps
shift_t: true # Reset initial time to 0 after discarding
"""
'lor_data.yaml\ndims:\n states: 3\n inputs: 0\n observations: 3\n\nx0:\n kind: uniform\n params:\n bounds:\n - [-1.0, 1.0]\n - [-1.0, 1.0]\n - [-1.0, 1.0]\n\nsolver:\n method: RK45\n rtol: 1.0e-8\n atol: 1.0e-8\n\npostprocess:\n n_skip: 4000 # Extra option to discard initial steps\n shift_t: true # Reset initial time to 0 after discarding\n'
# Data generation
sampler = TrajectorySampler(f, config='lor_data.yaml', rng=SEED)
ts, xs, ys = sampler.sample(t_grid, batch=1)
np.savez_compressed(DATA_DIR / 'l63_train.npz', t=ts[0][:M], x=xs[0][:M])
np.savez_compressed(
DATA_DIR / 'l63_valid.npz',
t=ts[0][:V],
x=np.array([xs[0][M:M+V], xs[0][M+V:M+2*V]]),
)
tt, xt, yt = sampler.sample(t_pred, batch=50)
np.savez_compressed(DATA_DIR / 'l63_test.npz', t=tt, x=xt)
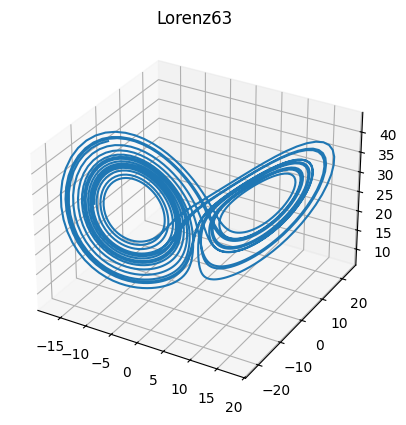
The training data is illustrated below, sketching the well-known Lorenz butterfly.
plot_trajectory(np.array(xs[0][:M]), ts[0][:M], None, labels=['Truth'], ifclose=False)
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.plot(xs[0, :M, 0], xs[0, :M, 1], xs[0, :M, 2])
ax.set_title("Lorenz63");
Configuring the Models¶
Next we set up the kernel models. Here we compare the standard Gaussian radial basis function (RBF) kernel against the diffusion-map (DM) kernel used in the maintained Lorenz-63 training script.
RIDGE = 1e-6
DIM = 3 # State dimension
# Configuration of kernels
opt_rbf = {
'type': 'sc_rbf',
'input_dim': DIM,
'lengthscale_init': None,
}
opt_dm = {
'type': 'sc_dm',
'input_dim': DIM,
'eps_init': None,
}
# Configuration of multi-output shared kernel models
mdl_rbf = {
'name': 'ker_model',
'encoder_layers': 0,
'decoder_layers': 0,
'kernel_dimension': DIM,
'type': 'share',
'kernel': opt_rbf,
'dtype': torch.float64,
'ridge_init': RIDGE,
'jitter': 0.0,
}
mdl_dm = copy.deepcopy(mdl_rbf)
mdl_dm['kernel'] = opt_dm
Next, we choose the standard linear trainer.
trn_ln = {
'n_epochs': 1,
'method': 'raw',
}
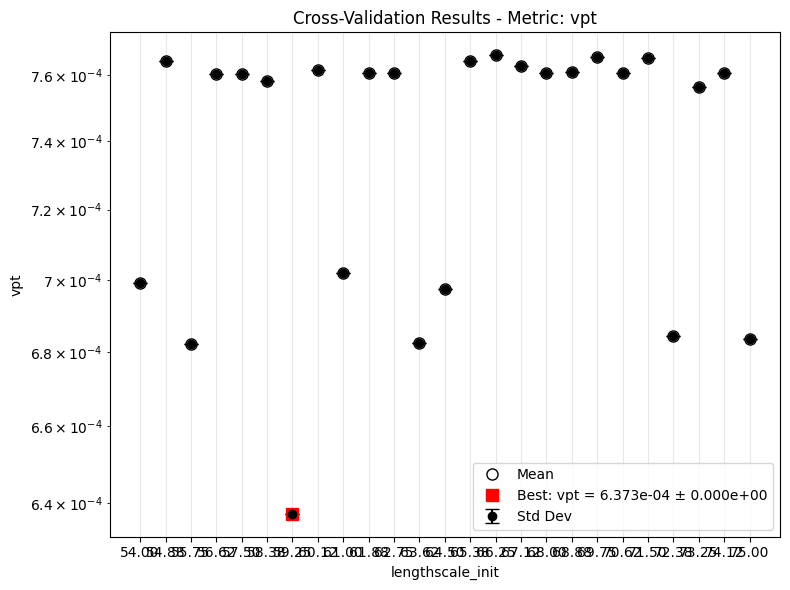
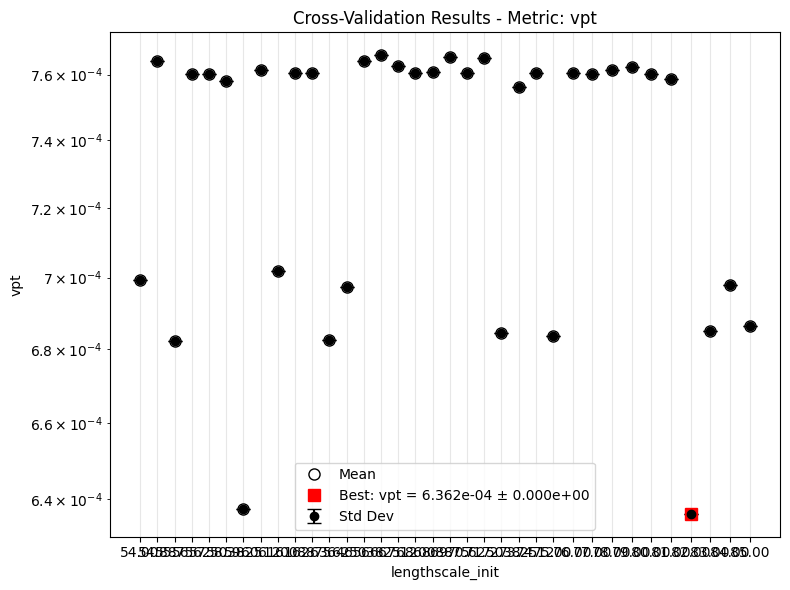
The main new ingredient is the CV sweep. For Lorenz-63 we use metric: "vpt", which refers to the validation VPT loss used during model selection. That loss is minimized during CV even though larger raw VPT values are better when we inspect final predictions.
The current maintained Lorenz-63 setup uses a focused one-dimensional sweep for each kernel family, then optionally extends the sweep with continue_training=True.
cv_rbf = {
'param_grid': {
'model.kernel.lengthscale_init': ('linspace', (54.0, 75.0, 25)),
'model.ridge_init': [1e-13],
},
'metric': 'vpt',
}
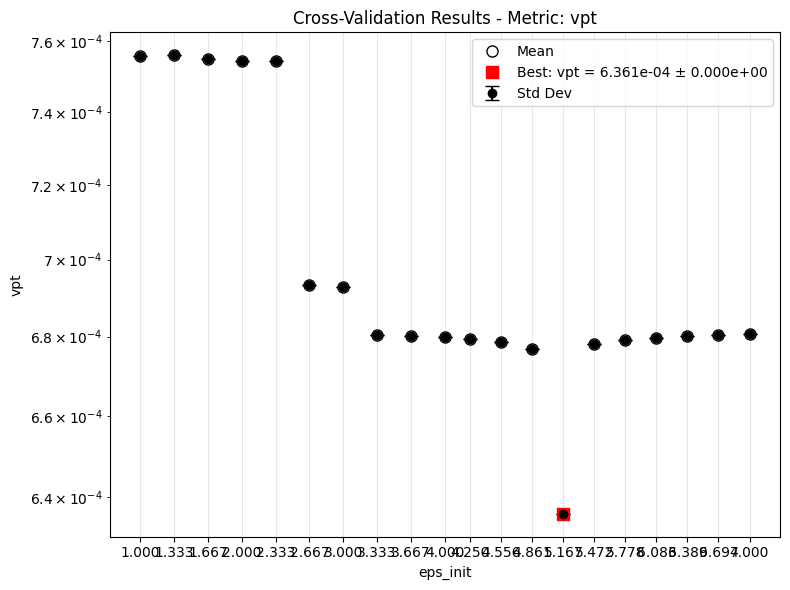
cv_dm = {
'param_grid': {
'model.kernel.eps_init': ('linspace', (1.0, 4.0, 10)),
'model.ridge_init': [1e-13],
},
'metric': 'vpt',
}
Paired with the above configuration is the model file. Here we keep the shared dataset and criterion settings in lor_model.yaml, while injecting the model-specific kernel and CV choices through config_mod. The separate data_valid entry is still the right way to supply a dedicated validation set.
"""lor_model.yaml
data:
path: './data/l63_train.npz'
n_samples: 1
n_steps: 2048
double_precision: true
data_valid:
path: './data/l63_valid.npz'
n_samples: 2
n_steps: 2000
double_precision: true
transform_x:
type: "scaler"
mode: "std"
split:
train_frac: 1.0
dataloader:
batch_size: 1
criterion:
vpt:
type: "vpt"
params:
gamma: 0.3
"""
config_path = 'lor_model.yaml'
Collect the configurations:
cfgs = [
('dks_rbf', DKMSK, LinearTrainer, {'model': mdl_rbf, 'cv': cv_rbf, 'training': trn_ln}),
('ddm_dm', DKMSK, LinearTrainer, {'model': mdl_dm, 'cv': cv_dm, 'training': trn_ln}),
]
IDX = [0, 1]
labels = [cfgs[i][0] for i in IDX]
Training and Validation¶
Round 1¶
Train the initial CV sweeps. DyMAD will evaluate each parameter combination, write the trial artifacts under the run directory, and save an aggregated *_cv.npz file for later inspection.
for i in IDX:
mdl, MDL, Trainer, opt = cfgs[i]
opt["model"]["name"] = f"lor_{mdl}"
trainer = Trainer(config_path, MDL, config_mod=opt)
trainer.train()
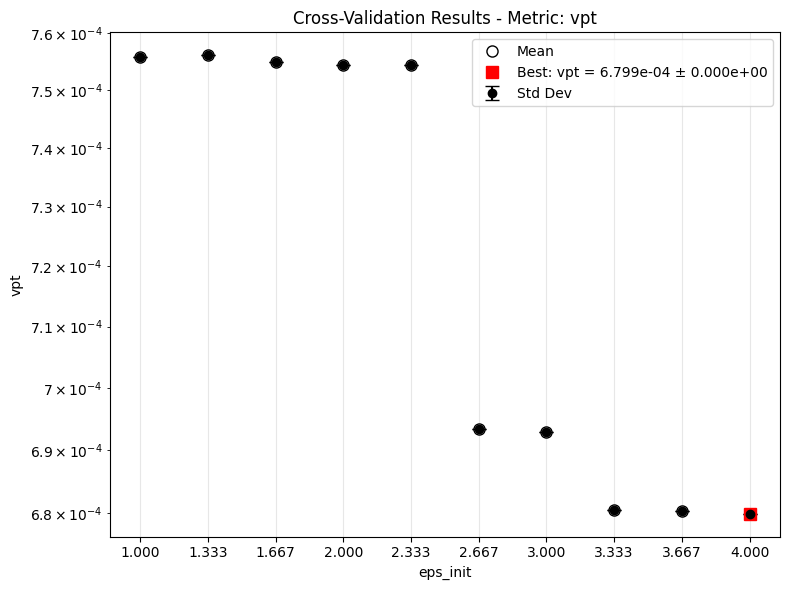
After the first round, inspect the validation VPT-loss sweep for each model. Lower values are better here because the CV metric is the VPT loss, not the raw VPT measured in prediction steps.
for i in IDX:
mdl = cfgs[i][0]
if i == 0:
_key = 'model.kernel.lengthscale_init'
else:
_key = 'model.kernel.eps_init'
_, ax = plot_cv_results(f'lor_{mdl}', [_key], ifclose=False)
ax.set_yscale('log')
Round 2¶
If you want to extend the search, update the CV range and resume from the existing run directory. With continue_training=True, DyMAD appends the new trials to the previous CV results instead of starting over.
cv_rbf = {
'param_grid': {
'model.kernel.lengthscale_init': ('linspace', (76.0, 85.0, 10)),
'model.ridge_init': [1e-13],
},
'metric': 'vpt',
}
cv_dm = {
'param_grid': {
'model.kernel.eps_init': ('linspace', (4.25, 7.0, 10)),
'model.ridge_init': [1e-13],
},
'metric': 'vpt',
}
cfgs = [
('dks_rbf', DKMSK, LinearTrainer, {'model': mdl_rbf, 'cv': cv_rbf, 'training': trn_ln}),
('ddm_dm', DKMSK, LinearTrainer, {'model': mdl_dm, 'cv': cv_dm, 'training': trn_ln}),
]
for i in IDX:
mdl, MDL, Trainer, opt = cfgs[i]
opt["model"]["name"] = f"lor_{mdl}"
trainer = Trainer(config_path, MDL, config_mod=opt)
trainer.train(continue_training=True) # Option to recycle previous results
Plot the accumulated CV results again after the resumed sweep.
for i in IDX:
mdl = cfgs[i][0]
if i == 0:
_key = 'model.kernel.lengthscale_init'
else:
_key = 'model.kernel.eps_init'
_, ax = plot_cv_results(f'lor_{mdl}', [_key], ifclose=False)
ax.set_yscale('log')
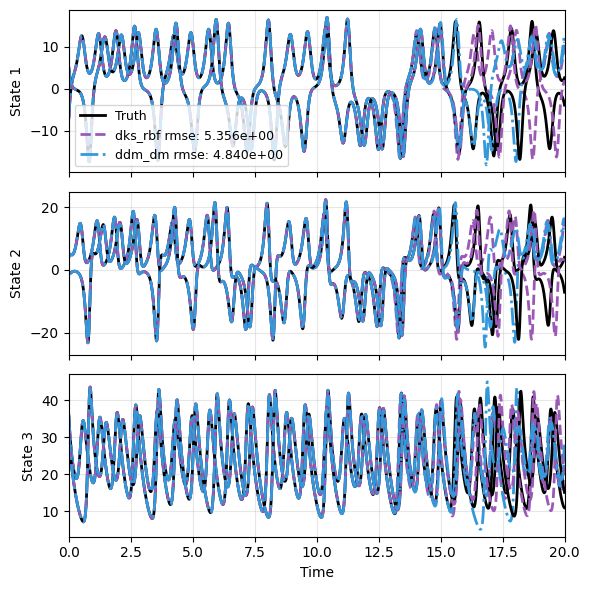
Results¶
Lastly we make predictions on the held-out test trajectories and plot two of them. We then summarize the VPT distribution computed from the exact vpt_loss helper.
data = np.load(DATA_DIR / 'l63_test.npz')
ts = torch.tensor(data['t'], dtype=torch.float64)
xs = torch.tensor(data['x'], dtype=torch.float64)
JDX = 20
res = [xs[:JDX]]
for _i in IDX:
mdl, MDL, _, _ = cfgs[_i]
_, prd_func = load_model(MDL, f'lor_{mdl}.pt')
with torch.no_grad():
pred = prd_func(xs[:JDX], ts[:JDX])
res.append(pred)
plot_multi_trajs(
np.array([r[:2] for r in res]), ts[0], "L63",
labels=['Truth']+labels, ifclose=False)
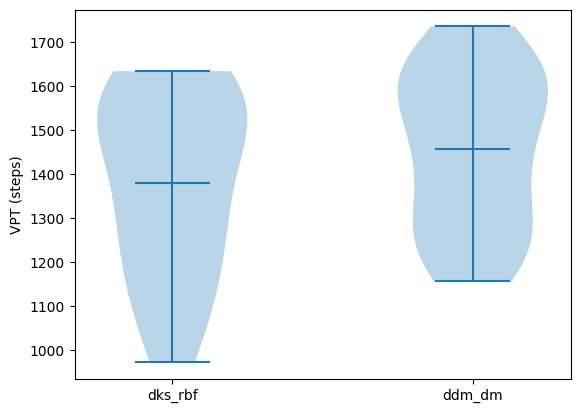
For a better characterization of the final prediction quality, we can use a violin plot of the exact VPT values. Below vpt_loss is a convenient helper for computing those step counts on the held-out trajectories.
In this setup the DM kernel typically outperforms the plain RBF kernel, which is consistent with the geometry of the Lorenz attractor.
vpt_rb, avr_rb = vpt_loss(res[1], res[0], gamma=0.3)
vpt_dm, avr_dm = vpt_loss(res[2], res[0], gamma=0.3)
f = plt.figure()
plt.violinplot([vpt_rb, vpt_dm], showmeans=True)
plt.xticks([1, 2], labels)
plt.ylabel("VPT (steps)");
We also provide more validation algorithms other than grid search. See scripts/linear_time_invariant/lti_nm.py for an example of using a Nelder-Mead-like optimizer to search for the optimal hyperparameters.