Example: Cylinder Flow - Part 2/3¶
Author: Dr. Daning Huang
Date: 10/14/2025
Updated: 05/07/2026
As discussed in Part 1, this part will train several models and visualize the predictions. If you have gone through the previous examples, then the main new things here are two handy visualization tools.
Setup¶
The imports:
import warnings
warnings.filterwarnings('ignore')
import copy
import matplotlib.pyplot as plt
import numpy as np
import torch
from dymad.io import load_model
from dymad.models import KBF, DKBF, DKMSK
from dymad.training import LinearTrainer, StackedTrainer
from dymad.utils import animate, compare_contour, plot_summary, setup_logging
Model options:
def gen_mdl_kb(e, l, k):
# Options for Koopman models
return {
"name" : 'vor_model',
"encoder_layers" : e,
"decoder_layers" : e,
"hidden_dimension" : l,
"koopman_dimension" : k,
"activation" : "prelu",
"weight_init" : "xavier_uniform",
"predictor_type" : "exp"}
mdl_kl = { # Kernel model using Diffusion Map
"name" : 'vor_model',
"encoder_layers" : 0,
"decoder_layers" : 0,
"kernel_dimension" : 12,
"type": "share",
"kernel": {
"type": "sc_dm",
"input_dim": 12,
"eps_init": None
},
"dtype": torch.float64,
"ridge_init": 1e-10
}
Training options - using explicit phases for alternating linear-solve / optimizer schedules:
# Base optimizer config for NODE phases
trn_nd = {
"n_epochs": 200,
"save_interval": 50,
"load_checkpoint": False,
"learning_rate": 5e-3,
"decay_rate": 0.999,
"sweep_lengths": [2],
"sweep_epoch_step": 100,
"chop_mode": "unfold",
"chop_step": 1,
"ode_method": "dopri5",
"ode_args": {
"rtol": 1.e-7,
"atol": 1.e-9}
}
# NODE trainer config, for a more nonlinear model
trn_ae = copy.deepcopy(trn_nd)
trn_ae["n_epochs"] = 2000
trn_ae["sweep_lengths"] = [2, 10, 50]
trn_ae["sweep_epoch_step"] = 500
# Enable reconstruction loss
crit = {
"dynamics" : {"weight" : 1.0},
"recon" : {"weight" : 1.0}}
# Linear trainer using generic least squares
trn_ln = {
"n_epochs": 1,
"save_interval": 50,
"load_checkpoint": False,
"method": "full"
}
# Linear trainer using linear solver given by model
## (Kernel Ridge Regression in this case)
trn_rw = copy.deepcopy(trn_ln)
trn_rw["method"] = "raw"
Data transformation options:
# SVD for dimension reduction
## Used to save training cost
trn_svd = {
"type" : "svd",
"ifcen": True,
"order": 12
}
# Normalize data by std
trn_scl = {
"type" : "scaler",
"mode" : "std",
}
# Appending unity to each sample
trn_add = {
"type" : "add_one"
}
# Diffusion Map model
trn_dmf = {
"type" : "dm",
"edim": 3,
"Knn" : 15,
"Kphi": 3,
"inverse": "gmls",
"order": 1,
"mode": "full"
}
The models to train:
kbf_node: Continuous-time Koopman model, SVD as observables, using least squares and finite difference (for \(\dot{z}\)) to estimate system matrix and NODE to refine the matrix.dkbf_ln: Discrete-time (DT) Koopman model - equivalent to DMD.dkbf_ae: DT Koopman, but with an NN autoencoder to compress data further into 3 dimensions - this needs the longest training time among the models, but still fast.dkbf_dm: DT Koopman, using Diffusion Map to further reduce the dimensionality; but this reduction is nonlinear.dks_ln: A simple DT nonlinear model by Diffusion Map, plus skip-connection. It is essentially a linear-regression type model, the data is normalized after SVD.
def _optimizer_phase(trainer, cfg):
phase = dict(cfg)
phase["type"] = "optimizer"
phase["trainer"] = trainer
return phase
def _linear_solve_phase(method, params=None, *, kwargs=None, reset_optimizer=True):
phase = {"type": "linear_solve", "method": method, "reset_optimizer": reset_optimizer}
if params is not None:
phase["params"] = params
if kwargs is not None:
phase["kwargs"] = kwargs
return phase
def _alternating_schedule(
trainer, base_cfg, chunk_epochs, *, method, params=None, kwargs=None, reset_optimizer=True
):
phases = []
for n_epochs in chunk_epochs:
phases.append(
_linear_solve_phase(
method, params=params, kwargs=kwargs, reset_optimizer=reset_optimizer
)
)
chunk_cfg = dict(base_cfg)
chunk_cfg["n_epochs"] = n_epochs
phases.append(_optimizer_phase(trainer, chunk_cfg))
phases.append(
_linear_solve_phase(method, params=params, kwargs=kwargs, reset_optimizer=reset_optimizer)
)
return phases
cfgs = [
('kbf_node', KBF, StackedTrainer,
{"model": gen_mdl_kb(0,0,13), "criterion": crit,
"phases": _alternating_schedule("NODE", trn_nd, [50, 150], method="full"),
"transform_x" : [trn_svd, trn_add]}),
('dkbf_ln', DKBF, LinearTrainer,
{"model": gen_mdl_kb(0,0,13), "training" : trn_ln, "transform_x" : [trn_svd, trn_add]}),
('dkbf_ae', DKBF, StackedTrainer,
{"model": gen_mdl_kb(3,64,3), "criterion": crit,
"phases": _alternating_schedule("NODE", trn_ae, [500, 500, 2000], method="full", reset_optimizer=False),
"transform_x" : [trn_svd]}),
('dkbf_dm', DKBF, LinearTrainer,
{"model": gen_mdl_kb(0,0,3), "training" : trn_ln, "transform_x" : [trn_svd, trn_dmf]}),
('dks_ln', DKMSK, LinearTrainer,
{"model": mdl_kl, "training" : trn_rw, "transform_x" : [trn_svd, trn_scl]}),
]
config_path = 'vor_model.yaml'
Training¶
The usual work.
IDX = [0, 1, 2, 3, 4]
for i in IDX:
mdl, MDL, Trainer, opt = cfgs[i]
opt["model"]["name"] = f"kp_{mdl}"
trainer = Trainer(config_path, MDL, config_mod=opt)
trainer.train()
Visualization¶
First load reference dataset, and compute the model predictions.
dat = np.load('./data/cylinder.npz')
x_data, t_data = dat['x'], dat['t']
Nx, Ny = 199, 449
res = [x_data]
for i in IDX:
mdl, MDL, Trainer, opt = cfgs[i]
_, prd_func = load_model(MDL, f'kp_{mdl}.pt')
with torch.no_grad():
pred = prd_func(x_data, t_data)
res.append(pred)
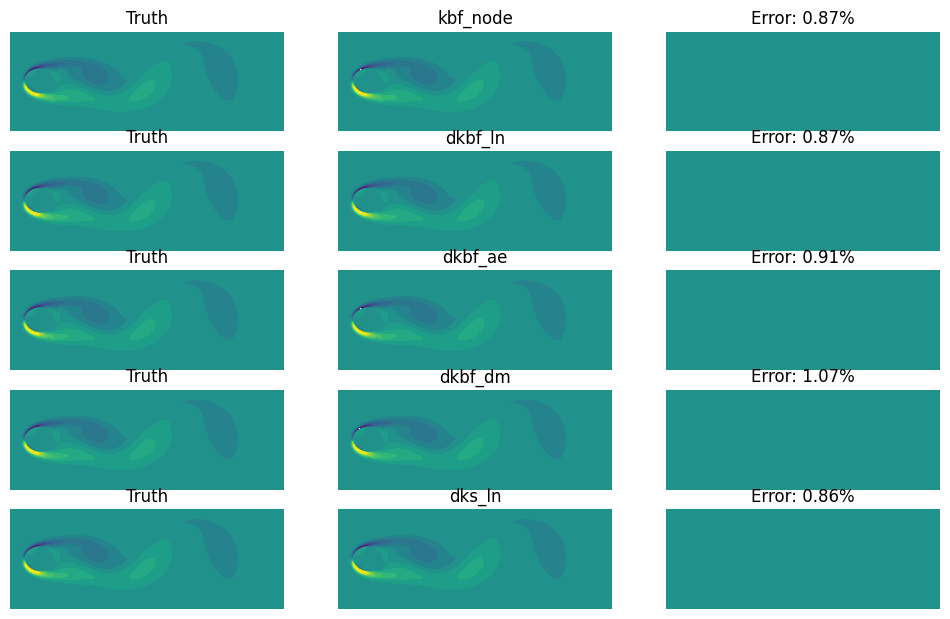
In the function below, we introduce a compare_contour function. It is a convenient tool to compare two 2D fields. It generates 3 contours: One for truth, 2nd for prediction, 3rd for the error.
See the comments for the usage.
N = len(IDX)
def contour_fig(j):
# A figure of Nx3 grid
fig, ax = plt.subplots(N, 3, sharex=True, sharey=True, figsize=(12, 1.5*N))
colorbar = j == 0
for i in range(N):
# Apply the function for each row of grid of axes
compare_contour(
res[0][j].reshape(Nx, Ny), # Truth, at step j
res[i+1][j].reshape(Nx, Ny), # Prediction, at step j
vmin=-12, vmax=12, # Range of colorbar
axes=(fig, ax[i]), # The axes to plot the contours
colorbar=colorbar) # Whether to plot colorbar
ax[i,1].set_title(cfgs[IDX[i]][0])
for _ax in ax.flatten(): # Turn off axis for this case
_ax.set_axis_off()
return fig, ax
Below is the case for step 40. All of them are doing a decent job.
contour_fig(40);
One can further use animate to make an animation of the comparison over time.
The output is not shown here to save storage. But feel free to try this locally.
setup_logging() # Show progress
animate(
contour_fig, # The function for plotting
filename="vis.mp4", # Filename
fps=10, # Frame per second
n_frames=len(t_data)) # Number of frames to plot